

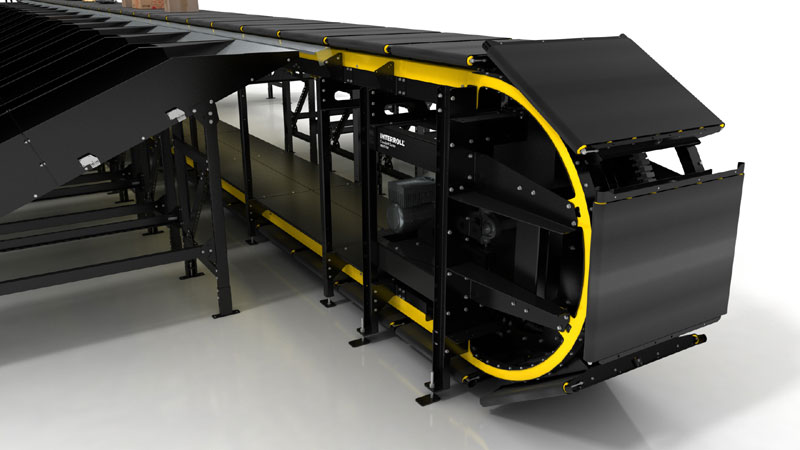
 Prostorově úsporný, energeticky účinný a se snadnou údržbou: nový svislý třídič MX 018V od firmy Interroll usnadňuje integrátorům a jejich koncovým zákazníkům vstup do světa systémů s třídiči s příčnými pásy. Především provozovatelé kurýrních a balíkových služeb, zásilkové obchody a poskytovatelé logistických služeb tak získají schopnost manipulovat s nejrůznějším zbožím prostorově úsporným, šetrným a energeticky účinným způsobem prostřednictvím jediné technické infrastruktury s vysokým počtem koncových bodů. Uživatelé zároveň oceňují výkon a ekonomické přednosti osvědčených, mechanicky poháněných třídičů s příčnými pásy od společnosti Interroll.
Prostorově úsporný, energeticky účinný a se snadnou údržbou: nový svislý třídič MX 018V od firmy Interroll usnadňuje integrátorům a jejich koncovým zákazníkům vstup do světa systémů s třídiči s příčnými pásy. Především provozovatelé kurýrních a balíkových služeb, zásilkové obchody a poskytovatelé logistických služeb tak získají schopnost manipulovat s nejrůznějším zbožím prostorově úsporným, šetrným a energeticky účinným způsobem prostřednictvím jediné technické infrastruktury s vysokým počtem koncových bodů. Uživatelé zároveň oceňují výkon a ekonomické přednosti osvědčených, mechanicky poháněných třídičů s příčnými pásy od společnosti Interroll.

-

AMPER 17.–19. 3. 2026 Mezinárodní veletrh elektrotechniky, elektroniky a energetiky Na jaře příštího roku se do Brna vrátí veletrh AMPER. Na brněnském výstavišti se potkají výrobci, vývojáři i dodavatelé technologií z oblastí elektrotechniky, elektroniky a energetiky.... -

Budoucnost podnikových systémů: Integrace umělé inteligence bude nezbytná Unicorn Vysoká škola pořádala další ze série tradičních online konferencí Unicorn University Open, tentokrát na téma budoucnosti enterprise systémů, neboli velkých systémů, které integrují...
 Krátké školení a použití profesionálních nástrojů od NSK: pomocí těchto dvou jednoduchých opatření dokázala společnost působící v odvětví recyklace skla snížit náklady na pracovní sílu potřebnou pro výměnu ložisek čtyřnásobně a prodloužit životnost namontovaných ložisek. V současné době je u mnoha druhů materiálů oběhové hospodářství teprve cílem, ale v případě skla je to po celá desetiletí běžná praxe. Zavedený řetězec recyklace skla významně přispívá k ochraně zdrojů přírodních surovin.
Krátké školení a použití profesionálních nástrojů od NSK: pomocí těchto dvou jednoduchých opatření dokázala společnost působící v odvětví recyklace skla snížit náklady na pracovní sílu potřebnou pro výměnu ložisek čtyřnásobně a prodloužit životnost namontovaných ložisek. V současné době je u mnoha druhů materiálů oběhové hospodářství teprve cílem, ale v případě skla je to po celá desetiletí běžná praxe. Zavedený řetězec recyklace skla významně přispívá k ochraně zdrojů přírodních surovin.
 Mundinger Transport, speditérská firma specializující se na distribuci materiálu z oceli v tyčích, sází v novém skladu bádensko-württemberského Rudersbergu trvale na průběžnou manipulaci s materiálem za využití vysokozdvižného vozíku. „Jeřáby používané ve většině skladů s dlouhým zbožím bývají často Achillovou patou pro účinnou interní logistiku," mluví o své zkušenosti jednatel firmy Dietmar Wiedmann. „Jsou-li naproti tomu všechny logistické procesy prováděny vysokozdvižným vozíkem, dostáváme velice flexibilní a efektivní systém." Protože firma Mundinger Transport materiál v tyčích pro své zákazníky rozdělí, podle konkrétní zakázky dá do svazků, zabalí a dokonce i nařeže, je efektivita při manipulaci s materiálem obzvláště důležitá. Wiedmann dodává: „Navýšením počtu použitých vysokozdvižných vozíků lze navíc velice jednoduše urychlit překládku skladu – to s jeřáby není možné."
Mundinger Transport, speditérská firma specializující se na distribuci materiálu z oceli v tyčích, sází v novém skladu bádensko-württemberského Rudersbergu trvale na průběžnou manipulaci s materiálem za využití vysokozdvižného vozíku. „Jeřáby používané ve většině skladů s dlouhým zbožím bývají často Achillovou patou pro účinnou interní logistiku," mluví o své zkušenosti jednatel firmy Dietmar Wiedmann. „Jsou-li naproti tomu všechny logistické procesy prováděny vysokozdvižným vozíkem, dostáváme velice flexibilní a efektivní systém." Protože firma Mundinger Transport materiál v tyčích pro své zákazníky rozdělí, podle konkrétní zakázky dá do svazků, zabalí a dokonce i nařeže, je efektivita při manipulaci s materiálem obzvláště důležitá. Wiedmann dodává: „Navýšením počtu použitých vysokozdvižných vozíků lze navíc velice jednoduše urychlit překládku skladu – to s jeřáby není možné."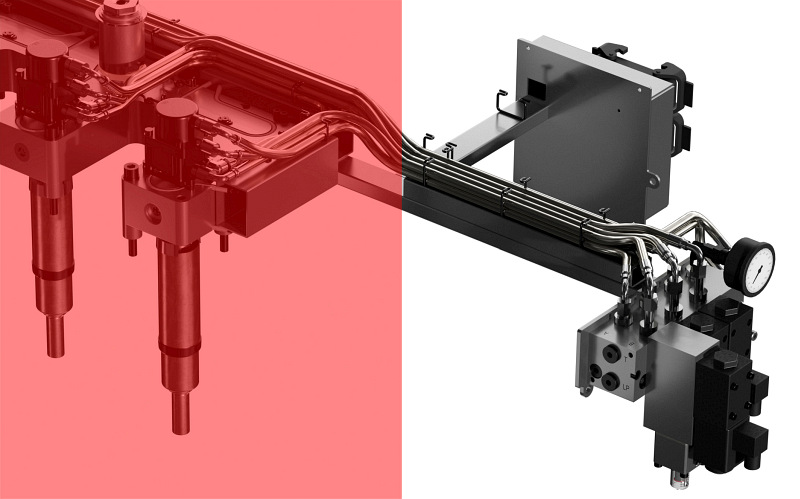 Italský Oerlikon HRSflow vyvinul mechanický regulátor zdvihu (MSR) pro hydraulicky ovládaný topný systém, který usnadňuje individuální přednastavení poloh otevírání jehel v systémech horkých vtoků. Uživatel pomocí nastavovacího šroubu stupnice stanoví individuální objem oleje, který topný systém poté použije k uvedení jehel do zamýšlených poloh. Tímto způsobem lze pokles tlaku pro každou trysku nastavit nezávisle a lze řídit rozložení tlaku během fáze dotlaku.
Italský Oerlikon HRSflow vyvinul mechanický regulátor zdvihu (MSR) pro hydraulicky ovládaný topný systém, který usnadňuje individuální přednastavení poloh otevírání jehel v systémech horkých vtoků. Uživatel pomocí nastavovacího šroubu stupnice stanoví individuální objem oleje, který topný systém poté použije k uvedení jehel do zamýšlených poloh. Tímto způsobem lze pokles tlaku pro každou trysku nastavit nezávisle a lze řídit rozložení tlaku během fáze dotlaku. Komplexní pohled na instalační techniku poskytuje nové perspektivy v automatizační technice, které otevírají lidem oči a šetří náklady. Proto se vyplatí systémově zaměřené úvahy, které chtějí specialisté, Martin Lanz a Wolfgang Wiedemann z Murrelektronik, blíže vysvětlit. V podstatě jde o výzvu k novému pojetí klasických způsobů myšlení v připojení strojů s výhodami systémového inženýrství. A sice dříve, než tak učiní konkurence!
Komplexní pohled na instalační techniku poskytuje nové perspektivy v automatizační technice, které otevírají lidem oči a šetří náklady. Proto se vyplatí systémově zaměřené úvahy, které chtějí specialisté, Martin Lanz a Wolfgang Wiedemann z Murrelektronik, blíže vysvětlit. V podstatě jde o výzvu k novému pojetí klasických způsobů myšlení v připojení strojů s výhodami systémového inženýrství. A sice dříve, než tak učiní konkurence! Téměř 10 let zkušeností má strojírenská firma s dodávkami pneumaticky do průmyslových firem v Česku. Kde se pneumatika nejvíc uplatňuje? Jaké má pneumatika Hennlich přednosti? Jaká je perspektiva dalšího vývoje? To v rozhovoru říká Jaroslav Velecký, který v Hennlichu vede tým pneumatiky.
Téměř 10 let zkušeností má strojírenská firma s dodávkami pneumaticky do průmyslových firem v Česku. Kde se pneumatika nejvíc uplatňuje? Jaké má pneumatika Hennlich přednosti? Jaká je perspektiva dalšího vývoje? To v rozhovoru říká Jaroslav Velecký, který v Hennlichu vede tým pneumatiky. Elesa+Ganter jakožto světový specialista a výrobce normovaných dílů do průmyslu se neobává žádných výzev. Proto v našem sortimentu naleznete řadu dílů specifických vlastností. Normované díly se specifickými vlastnostmi a ergonomickým designem, které jsou v souladu s přísnými směrnicemi pro splnění konkrétních potřeb a aplikací. Takovým požadavkem může být například zajištění bezpečnosti v prostorách, kde hrozí elektrostatické výboje, nebo hrozí dokonce požár.
Elesa+Ganter jakožto světový specialista a výrobce normovaných dílů do průmyslu se neobává žádných výzev. Proto v našem sortimentu naleznete řadu dílů specifických vlastností. Normované díly se specifickými vlastnostmi a ergonomickým designem, které jsou v souladu s přísnými směrnicemi pro splnění konkrétních potřeb a aplikací. Takovým požadavkem může být například zajištění bezpečnosti v prostorách, kde hrozí elektrostatické výboje, nebo hrozí dokonce požár. Řešení pro průmysl budoucnosti
Řešení pro průmysl budoucnosti V nadmořské výšce 2100 m je Tignes jednou z nejvýše položených vesnic v Evropě. Je propojena s údolím Val d'Isere, v kterém se nachází jeden z nejluxusnějších lyžařských areálů ve francouzském departementu Savoy. Při modernizaci lanové dráhy na Grande Motte se spoléhá švýcarská společnost GARAVENTA na spolehlivé a nenáročné průmyslové převodovky od NORD DRIVESYSTEMS.
V nadmořské výšce 2100 m je Tignes jednou z nejvýše položených vesnic v Evropě. Je propojena s údolím Val d'Isere, v kterém se nachází jeden z nejluxusnějších lyžařských areálů ve francouzském departementu Savoy. Při modernizaci lanové dráhy na Grande Motte se spoléhá švýcarská společnost GARAVENTA na spolehlivé a nenáročné průmyslové převodovky od NORD DRIVESYSTEMS.













Časopis T+T Technika a Trh

|

|
| Aktuální číslo | Předchozí číslo |







RSS Sitemap Trends Zásady ochrany osobních údajů Tvorba webových stránek Brno - Webservis © 2023. Všechna práva vyhrazena.