w w w . t e c h n i k a a t r h . c z
manipulační technika
l
doprava
43
pro manipulaci s materiálem transportním
zařízením. Parametry zadání splnil sloupo-
vý jeřáb značky ITECO a vakuový manipu-
látor od firmy VAKUUMTECHNIK. Zaříze-
ní byla pořízena jako jeden investiční
celek, včetně TruLaseru. Pracoviště dělení
materiálu za získalo pro svůj jedno až
dvousměnný provoz komplexní vybavení
od 3 předních dodavatelů.
Instalace a zprovoznění
d
Pro TruLaser nebylo prostory nijak upra-
vovat, protože únosnost podlahy vyho-
vovala požadovaným parametrům. Pro
sloupový jeřáb bylo nutné připravit kot-
vení v podobě vybetonování kotvicí pat-
ky, kam na základě šablony byly zabeto-
novány kotvicí šrouby. Po třítýdenním
vyzrání základového betonu tak bylo
možno bezpečně instalovat jeřáb. Ten byl
dodán v provedení ABUS VS, tedy slou-
pový otočný jeřáb s elektrickým řetězo-
vým kladkostrojem. Technologie byla do-
plněna Vakuovým manipulátorem.
Sloupový otočný jeřáb
ABUS VS s kladkostrojem
ABUCompact GM8
d
Sloupový otočný jeřáb VS značky ABUS
přenáší břemena, kterými již nelze bez-
pečně a komfortně hýbat ručně. Jeřáb je
proto vybaven elektrickými, dvoustupňo-
vými pohony pro pojíždění kočky a otáče-
ní ramene. Závěsný ovladač pojízdný pa-
ralelně s výložníkem je nezávislý na
poloze břemene a zjednodušuje tak mani-
pulaci a práce je bezpečnější. Jeřáb je při-
pevněn pomocí tzv. „ideálních” kotev na
podlahovém základu.
Před samotnou instalací jeřábu je nutné
splnit několik podmínek. Investor se ve
spolupráci s dodavatelem musí rozhod-
nout jakým způsobem bude jeřáb kotvit.
Jsou dvě varianty: buďto bude jeřáb kot-
ven na betonový základ - tzv. patku, kdy si
investor vybuduje patku a armovací koš
dle dodavatelem zadaných parametrů ne-
bo zvolí druhou variantu kotvení, a to do
stávající podlahy přes ocelovou roznášení
desku na závitové týče a chemické kotvy.
U obou případů musí být proveden static-
ký výpočet statikem.
Sloupové jeřáby ABUS se dělí na tři typy.
Prvním, s označením LS – lehká konstrukce
– kladkostroj jezdí uvnitř profilu výložníku
(ramene). U tohoto jeřábu je otáčení ra-
mene a pojezd kladkostroje ruční, zdvih je
elektrický dvourychlostní s širokou škálou
volby rychlostí. Druhým typem je LSX - vý-
ložník je již z klasického profilu a kladko-
stroj projíždí po spodní přírubě buď elek-
tricky dvourychlostně nebo ručně, otoč je
ruční, zdvih opět elektrickýelektrický
dvourychlostní s velkým výběrem rych-
lostí. Posledním typem je jeřáb VS kdy
zde si může zákazník vybrat otáčení ruč-
ní či elektrické dvourychlostní, stejně ja-
ko u pojezdu kladkostroje a zdvihu. Jeřá-
by LS a LSX mají otoč 270° s možností
omezení pomocí dotazů. Jeřáby VS mají
otoč 360° a možnost omezit úhel pomocí
dotazů. U elektrických pohonů je mož-
nost je vybavit koncovými vypínači pohy-
bu. Ovládání může být ovladačem zavě-
šeným na kladkostroji nebo nezávislé,
kdy ovladač jezdí v samostatném C-profi-
lu a obsluha je dál od břemene. Toto ovlá-
dání se používá u manipulace s většími vý-
robky. V nabídce je i ovládání klasickým
rádiovým dálkovým ovladačem. Jeřáby se
vyrábějí v nosnostech od 80 kg do 6,3 t.
Délka výložníku (ramene) a výška jeřábů
je volitelná dle požadavků zákazníka
ovšem s kontrolou zadání dodavatelem,
zda daný požadavek je technicky reálný.
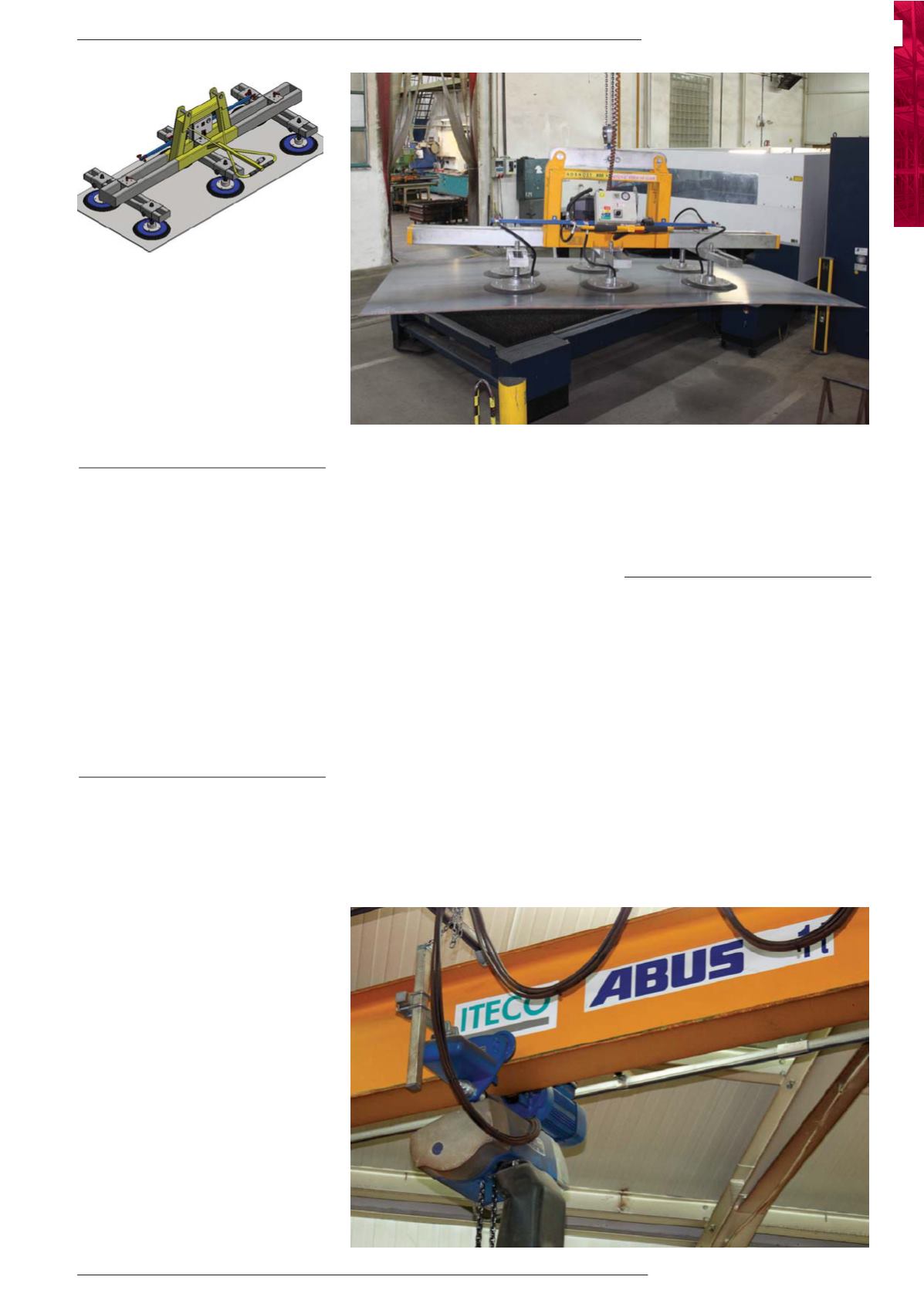
Vakuový manipulátor
VM 1000/6-2,5×1
d
Vakuové manipulátory se vyznačují jed-
noduchou a bezpečnou obsluhou, mini-
mální údržbou a dlouhou životností. Mani-
pulátor je složený z hlavní ocelové nosné
konstrukce s dvoubodovým závěsem
u uchopení na hák jeřábu. Pro variabilitu
možnosti transportovat plechy různých roz-
měrů je přípravek vybaven ručně přesouva-
telnými příčnými traverzami, na jejichž kon-
ci jsou přísavky o průměru 370 mm.
Přísavky jsou ručně stavitelné jak v ose x,
tak i v ose y. na těle manipulátoru je při-
pevněna vakuová pumpa se zásobníkem,
díky němuž je zajištěna potřebná bezpeč-
nost transportu břemene i při neočekáva-
ném výpadku elektrického napájení vývě-
vy. Tímto opatřením je jednak zajištěna
ochrana nákladného pálicího pracoviště,


